The CoLeCT project
The CoLeCT project focused on developing robot control methods to handle tasks involving transitions between unconstrained free air motions and in-contact motion constrained by the environment.
We did this by studying the following problem:
- Contact force minimization: Based on measurements from the real systems, a dynamical model is determined and a force observer set up. This allows to set up a probabilistic framework
using the Generalized Likelihood Ratio Test to determine whether the forces correspond to contact. - Online estimation and safe adaptive force control: Using online parameter estimation methods on manifolds, it is possible to estimate the surface normal vector. This can be used to adapt the parameters of an admittance controller such that the robot is always aligned with and applying a force in the contact direction. Using Control Barrier Functions, we can bound the forces under a given safety limit.
- Learning of force profiles from expert demonstration: To make the force controller easy to set up, we gather task demonstrations from experts and encode these probabilistically using Kernelized Movement Primitives. This makes it possible to adapt the force profiles to unseen situations that are similar to those in the demonstrations.
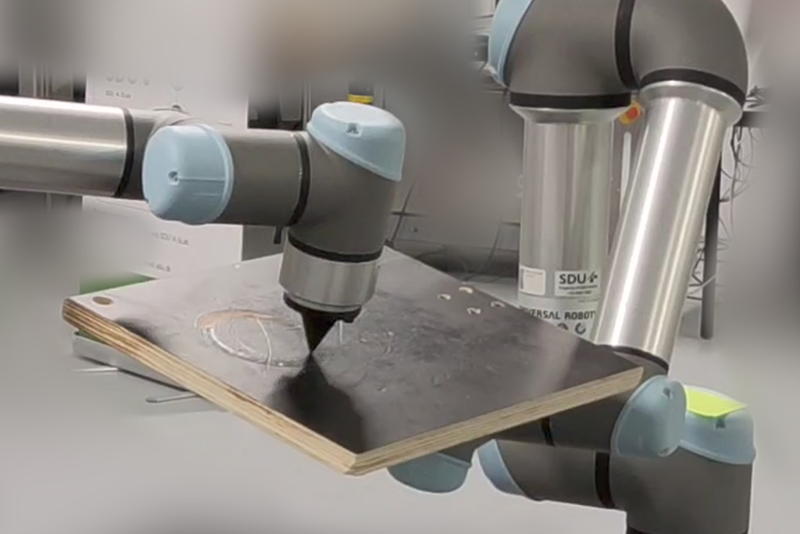
These problems were studied in use cases provided by ROPCA ApS and Nordbo Robotics A/S, involving robotic ultrasound scanning of upper extremities and industrial surface finishing.

Adaptive admittance control for alignment to unknown surfaces.
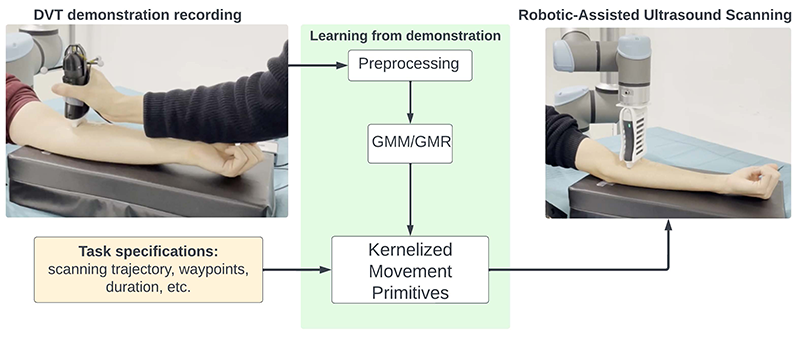
System for learning robotic ultrasound force scanning profiles from demonstration.
The participants were:
- The University of Southern Denmark (SDU)
- Technical University of Denmark (DTU)
- Ropca
- Nordbo Robotics
- Odense Robotics
For further information please contact
Iñigo Iturrate, SDU Robotics, inju@mmmi.sdu.dk
The project has been funded by the Danish Agency for Higher Education and Science through Innovationskraftbevillingen 2021-2024.